Le GNSS est un système de positionnement par satellite composé de plusieurs constellations : GPS (USA), GLONASS (Russie), Galileo (Europe), BeiDou (Chine), QZSS (Japon), IRNSS (Inde) et services associés (SBAS)…
Le signal satellite
Chaque satellite est un émetteur diffusant des ondes radio, un peu à la manière d’un relais de télévision. Le «récepteur» GNSS, c'est-à-dire l’instrument dont on se sert pour effectuer des mesures, a pour fonction de recevoir les signaux émis par chaque satellite visible, et de calculer une position instantanée dans les trois dimensions : latitude, longitude et altitude.
Toutes ces mesures de position reposent sur des mesures de temps extrêmement précises. Pour cela, chaque satellite est pourvu d’horloges atomiques, d’ordinateurs de bord et d’antennes pour l’émission des signaux. Les fréquences d’émission de ces signaux sont situées aux alentours de 1,5 GHz, ce qui rend ce système très robuste par rapport aux conditions météorologiques, puisque le système n’est quasiment pas affecté par la pluie, neige, brouillard, vent, plein soleil...
Ces signaux contiennent des « messages », indiquant aux récepteurs GNSS le numéro du satellite concerné, les informations relatives à sa trajectoire (éphémérides), son état de fonctionnement ainsi que d’autres informations complémentaires. A partir de ces informations, les récepteurs GNSS sont capable de déterminer leur position avec différents niveaux de précision…
La trilatération
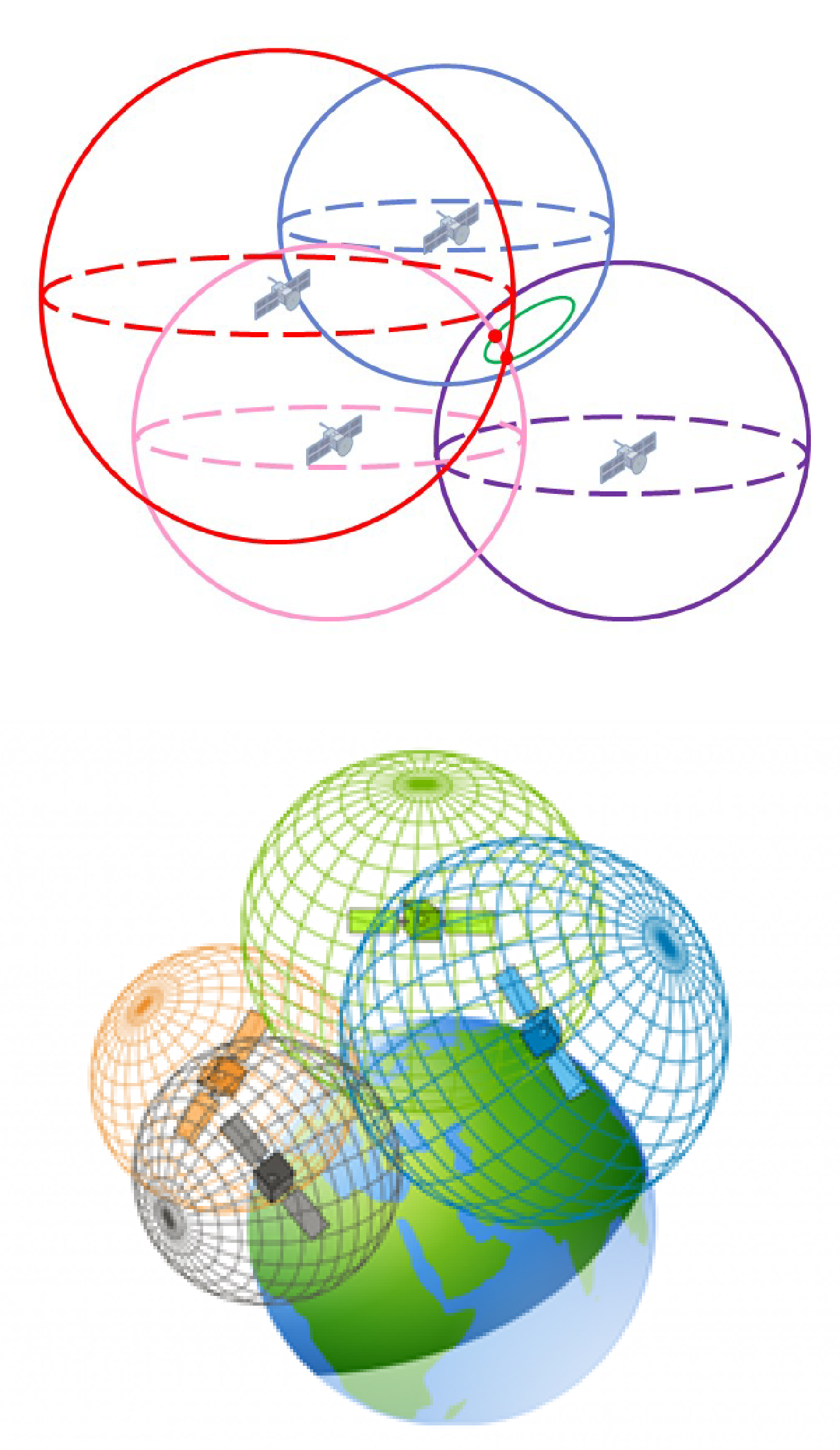
La technologie GNSS utilise la méthode de la trilatération pour calculer la position géographique de l’utilisateur. La trilatération s’apparente à la triangulation, mais en s’appuyant sur des mesures de distance là où la triangulation repose sur des mesures d’angles. La distance qui sépare l’antenne du récepteur GNSS de chacun des satellites GNSS visibles est obtenue en mesurant le temps de propagation des signaux dans l’espace, c'est-à-dire le temps que mettent les ondes radioélectriques diffusées par les satellites GNSS pour atteindre le récepteur GNSS. Ces signaux ont deux composantes : le Code et la Phase (porteuse). Le Code est un signal numérique, robuste, utilisé par tous les récepteurs, mais qui conduit à une précision « plancher » de ±50cm HRMS lorsqu’une correction différentielle est appliquée. La Phase est utilisée par les récepteurs GNSS de plus grande précision. Il s’agit d’un signal sinusoïdal avec une longueur d’onde voisine de 20cm, permettant d’obtenir des mesures de distance plus fines, donc une précision plus importante qui peut atteindre ±1cm HRMS. Cependant, la réception du signal de Phase est plus « fragile » que pour le Code, et nécessite des environnements de mesure raisonnablement dégagés pour pouvoir être exploitée.
Une fois connue la distance séparant le récepteur d’un satellite, celui-ci « sait » qu’il se trouve à la surface d’une sphère centrée sur ce satellite. Un satellite n’est donc pas suffisant pour qu’il puisse déterminer sa position. Ce sont au minimum quatre satellites qui sont nécessaires pour mesurer une position en trois dimensions (latitude, longitude et altitude, ou encore X, Y, Z). L’un des quatre satellites a pour mission de synchroniser l’horloge interne du récepteur GNSS avec une horloge atomique embarquée sur ce satellite. |
La précision en mode autonome
Sans correction particulière, un récepteur GNSS est dit travailler en mode Autonome, ou Naturel. Dans un milieu raisonnablement dégagé, sans perturbation lié à l’environnement, la précision du mode Autonome se situe à environ ±5m HRMS, parfois un peu meilleure pour les récepteurs GNSS haut de gamme. La précision altimétrique VRMS est environ 1,5 fois pire en Z (altimétrie).
Les paramètres affectant la précision des mesures
La précision des mesures peut être affectée par des erreurs liées au système GNSS en lui même et à l'environnement.
Les erreurs liées au système
Des erreurs sont inhérentes au système GNSS. Hormis le brouillage volontaire des militaires américain (appelé Selective Availbility ou SA, interrompu depuis le 1er mai 2000), ces erreurs sont les suivantes :
- La propagation dans les différentes couches atmosphériques (l’ionosphère et la troposphère) : les effets de cette propagation sur le signal sont d’autant plus dommageables que le satellite est bas sur l’horizon. Cette source d’erreur représente environ 50% du bilan des erreurs.
- Les erreurs d’horloge : malgré leur très grande précision, les horloges atomiques embarquées sur les satellites GNSS n’ont pas une précision infinie, et les erreurs d’horloge peuvent occasionner une imprécision de l’ordre du mètre.
- Les erreurs d’éphémérides : à cause de la proximité d’astres tels que la Terre, la Lune ou le Soleil, les satellites dérivent en permanence par rapport à leur trajectoire théorique. Leur trajectoire est donc recalculée quotidiennement par plusieurs postes de contrôle terrestres. Ceux-ci mettent à jour de manière régulière les trajectoires de chacun des satellites par commande radio
Le cumul de ces erreurs limite la précision des récepteurs GNSS à des précisions de l’ordre de ±5m HRMS, même si la précision « relative » d’une position à l’autre est beaucoup plus importante.
Plusieurs méthodes permettent d’améliorer la précision des mesures. Elles sont regroupées sous la dénomination de GNSS Différentiel, avec des particularités suivant le mode de correction temps réel ou post-traitement, sur le Code ou la Phase : RTK, PPK, PPP, DGNSS… En fonction du modèle de récepteur GNSS utilisé et du mode de correction appliqué, il est possible d’obtenir une précision centimétrique.
Les erreurs liées à l’environnement
- Les multi-trajets : surviennent lorsque le signal diffusé par le satellite parvient au récepteur GNSS après réflexion sur des obstacles proches, tels que des arbres, bâtiments, étang (pour les satellites bas sur l’horizon), etc... Lorsque cela est possible, il est préférable de se tenir à distance de tels obstacles, qui « bruitent » les signaux et dégradent la précision.
|
> www.gnssplanning.com/#/maps (cocher TEC ou Scintillement) |
Améliorer la précision des mesures avec le mode GNSS Différentiel
Le mode GNSS Différentiel permet d’augmenter la précision des mesures GNSS en supprimant tout ou partie des erreurs affectant une mesure de position. Suivant le modèle de récepteur GNSS, plusieurs modes différentiels peuvent être utilisés, parmi lesquels le mode différentiel sur le Code, la Phase, en Temps réel (instantané) ou en Post-Traitement (différé). Chaque mode possède ses avantages et ses contraintes. La précision maximum accessible en mode différentiel se situe à quelques millimètres environ, et concerne principalement les applications de géodésie et de topographie.
Principe du mode différentiel
Le principe général du mode différentiel consiste à utiliser un ou plusieurs récepteurs GNSS installés sur des points fixes et de coordonnées connues (appelés Base, ou Station de Référence). Ces Bases mesurent en continu l’écart entre leur position instantanée (précision ±5m HRMS) et leur position de référence, déterminée par l’IGN ou un géomètre. Cet écart, appelé correction différentielle, représente le bilan de toutes les erreurs intrinsèques du système à un instant donné (cf §4). Comme tous les récepteurs GNSS situés dans un certain rayon seront affectés des mêmes erreurs simultanément, cet écart est retranché pour chacune des positions enregistrées par les Mobiles pour compenser ces erreurs.
La Base doit pouvoir observer tous les satellites utilisés par les Mobiles. Pour cela, un masque d’élévation de 5° ou 10° au-dessus de l’horizon, contre un masque de 10° à 15° pour les Mobiles. Ainsi, la Base pourra suivre tous les satellites utilisés par les Mobiles situés dans un rayon de 500km.
La précision des mesures dépend de la distance séparant la Base des Mobiles, principalement causée par les trajectoires différentes des signaux GNSS dans les couches ionosphériques et troposphériques. Suivant le modèle, une imprécision de 1 à 10ppm (soit 1cm à 10cm d’imprécision tous les 10km) peut s’ajouter à la précision intrinsèque du récepteur.
Plusieurs formats de correction sont disponibles sur le marché, suivant qu’il s’agissent de corrections en temps réel (RTCM 2.x, RTCM 3.x, CMR, CMR+, CMRx…) ou en post-traitement (fichiers RINEX 2.x, RINEX 3.x, .SSF, .DAT, Atom…).
Les modes différentiels
- Correction différentielle temps réel (instantané)
Par sa simplicité de mise en œuvre, l’immédiateté des résultats et la très bonne couverture des réseaux de télécommunication, le mode temps réel s’est imposé comme le mode de correction GNSS différentiel le plus répandu. Découvrez les 3 modes de correction différentielle temps réel, en consultant les articles dédiés :
> "VRS : comment fonctionne ce mode de correction RTK ?"
> "PPP : comment fonctionne ce mode de correction RTK ?"
> "Base mobile : comment fonctionne ce mode de correction RTK ?"
- Correction différentielle Post-Traitement (différé)
Ce mode offre l’avantage de ne pas être tributaire de la qualité de la couverture d’un territoire par une liaison radio, Internet ou satellite et permet d’appliquer les corrections aux levés à postériori.
> Consultez l'articles dédié : "Post-traitement: comment fonctionne ce mode de correction ?"
Pour approfondir vos connaissances sur la technologie GNSS, nos formateurs vous proposent des FORMATIONS SUR MESURE.